Daniel Christopher Hoinkiss1, Han Nijsink2, Paul Borm3, Sabrina Haase1, Jan Strehlow1, Jurgen Futterer2, and Torben Pätz1
1Fraunhofer Institute for Digital Medicine MEVIS, Bremen, Germany, 2Radboud University Medical Centre (Radboudumc), Nijmegen, Netherlands, 3Nano4imaging GmbH, Aachen, Germany
1Fraunhofer Institute for Digital Medicine MEVIS, Bremen, Germany, 2Radboud University Medical Centre (Radboudumc), Nijmegen, Netherlands, 3Nano4imaging GmbH, Aachen, Germany
The presented workflow for automatic interventional slice steering combines
real-time tracking information based on passive MRI markers with pre-calculated
therapy planning for smooth and accurate device monitoring that
increases precision during MR-guided interventions.
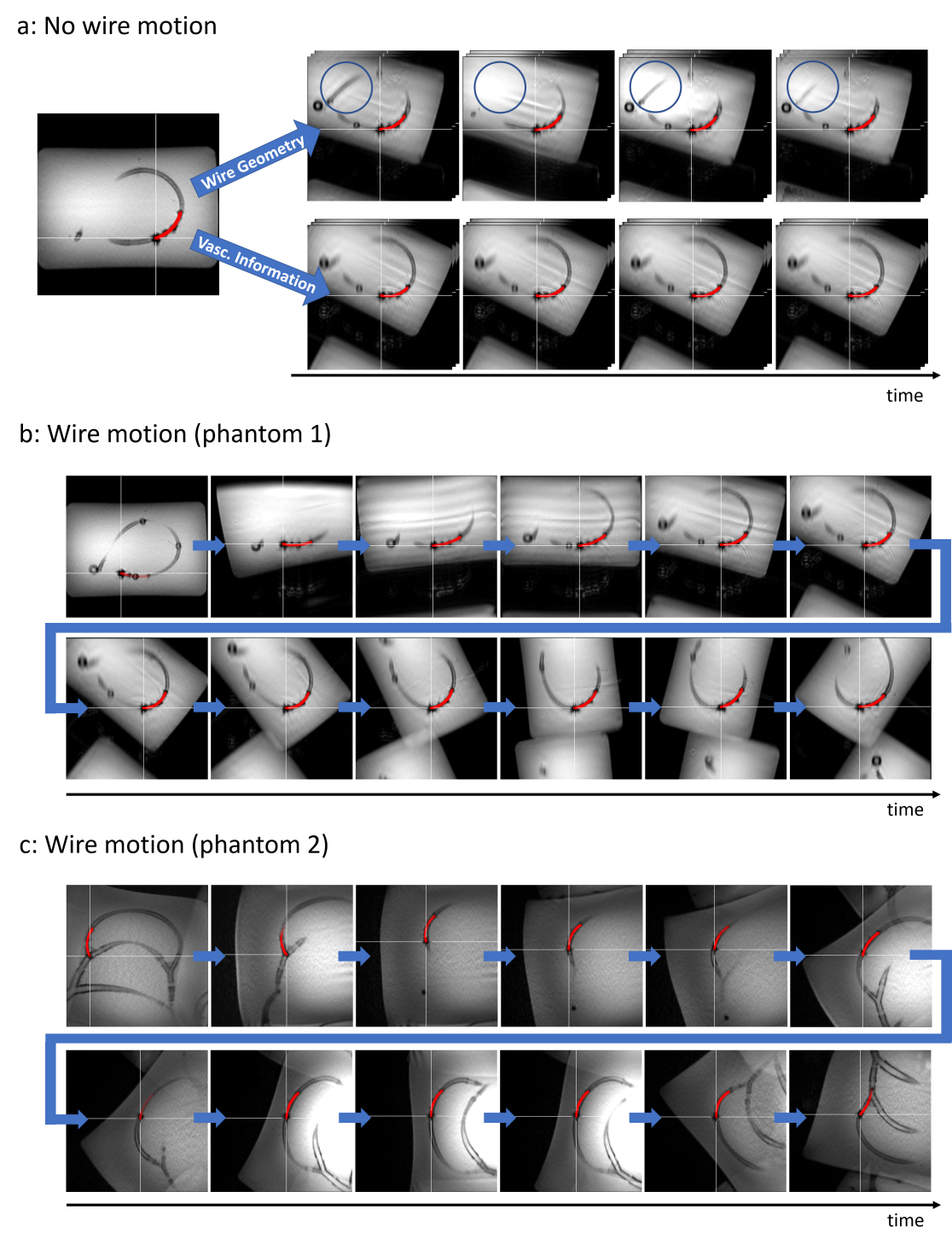
Figure 5: a)
Automatic slice steering based on reconstructed wire geometry (top) and
vascular information (bottom) with a non-moving wire. A slight jittering of the
real-time slices can be seen in the top row where orientation of the slices
changes between timepoints (see differences in blue circle). b) and c) Time
series of real-time images, acquired with slice steering and while performing guidewire
motion. The
experiments were performed at different MRI sites using two different MRI
phantoms.

Figure 3: An
additional option allows to use a-priori information of pre-processed vessel
masks and the envisioned path for intervention (a). A smoothed path
representation is synchronized to the reconstructed wire geometry (b) and
sample points are calculated based on the interventional path (c) with which
the imaging plane information can be calculated (d). This allows to better
align the real-time MRI slices to the vascular characteristics.
