Thomas Ulrich1 and Klaas Paul Pruessmann1
1Institute for Biomedical Engineering, ETH Zurich and University of Zurich, Zurich, Switzerland
1Institute for Biomedical Engineering, ETH Zurich and University of Zurich, Zurich, Switzerland
Our algorithm achieved high accuracy and precision during the phantom experiment. RMS error was about 25 micrometers for all translation directions, and 0.04 degrees around all rotation axes. It was also able to estimate motion of our volunteer during the in-vivo experiments.
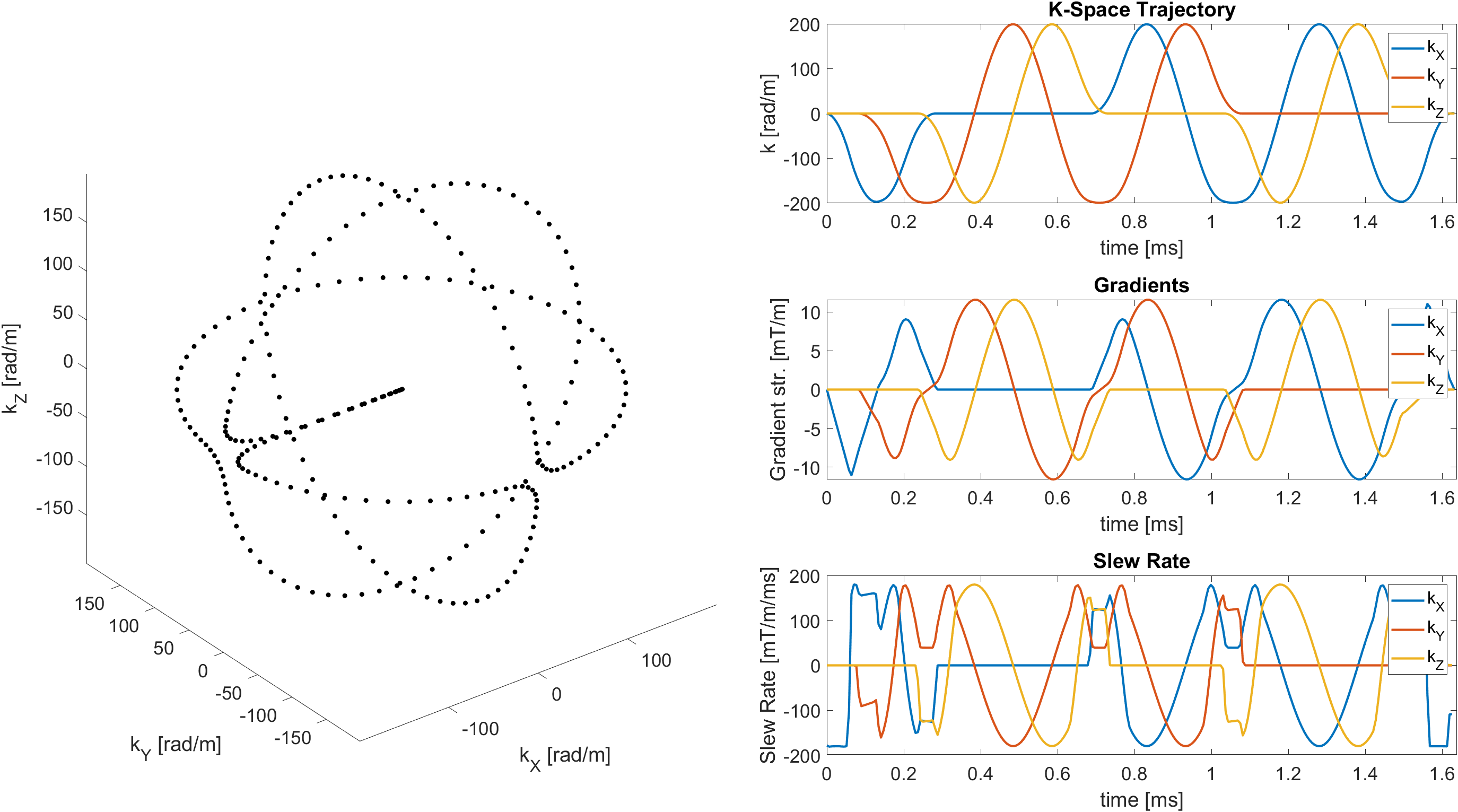
Orbital navigator k-space trajectory. Left: Parametric plot of the trajectory shape. Right: Plots of the trajectory, gradients, and slew rate over time. The trajectory is made up of three orthogonal circles, with smooth transitions in between them. At a radius of 200 rad/m, the navigator gradients can be executed in about 1.65 milliseconds.
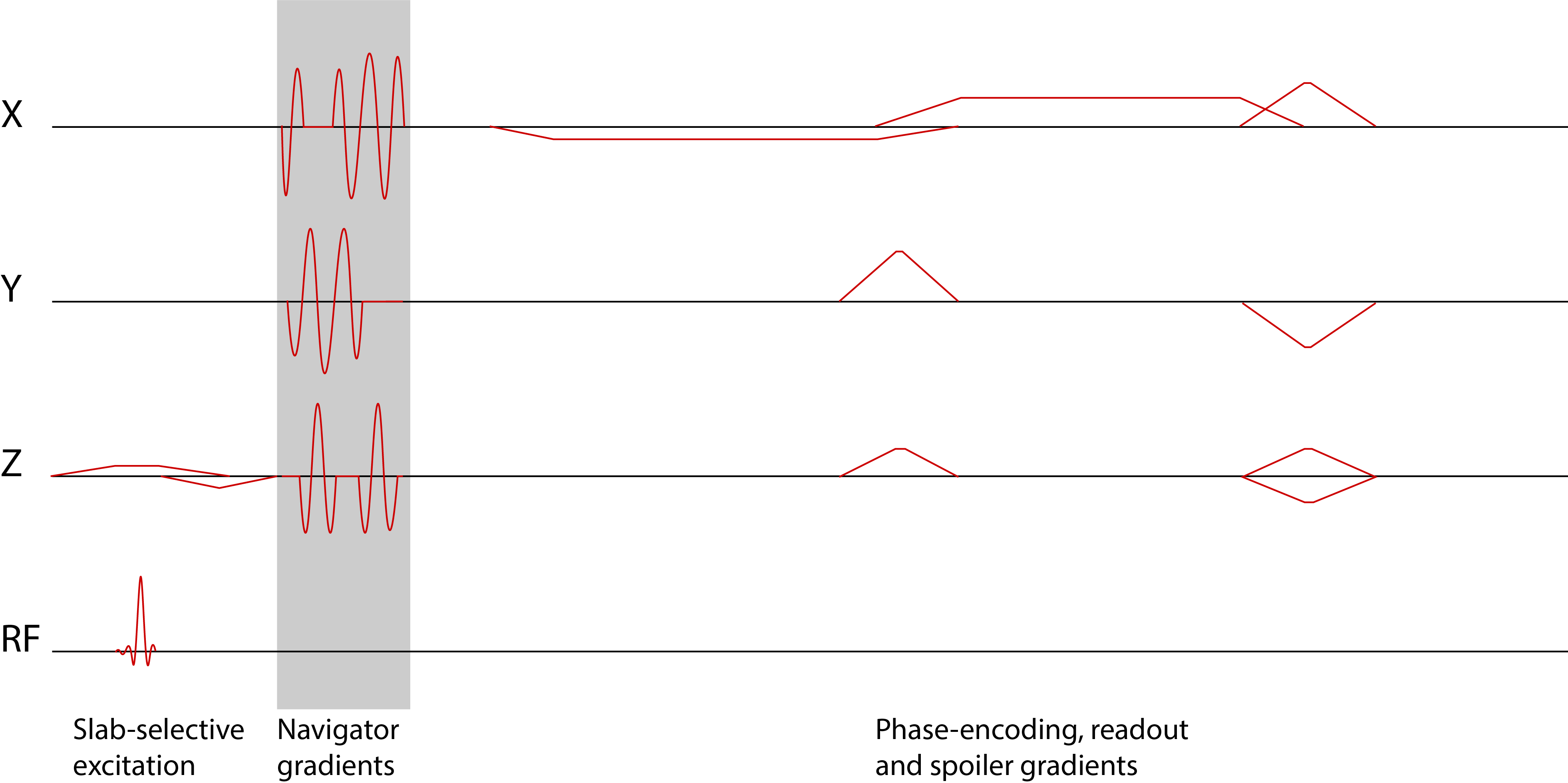
Sequence diagram of a 3D T2*-weighted FFE sequence with 3D orbital navigator gradients inserted after the excitation and before the phase-encoding gradients.
