Ekin Karasan1, Alison Hammerschmidt1, Victor Taracila2, Fraser Robb2, and Michael Lustig1
1University of California, Berkeley, CA, United States, 2GE Healthcare, Coils, Aurora, OH, United States
1University of California, Berkeley, CA, United States, 2GE Healthcare, Coils, Aurora, OH, United States
We previously proposed caterpillar traps: a distributed system of small, flexible cable traps covering the full length of the cable. Here, we make improvements to the manufacturing process and show results from additional experiments to evaluate their robustness and performance.
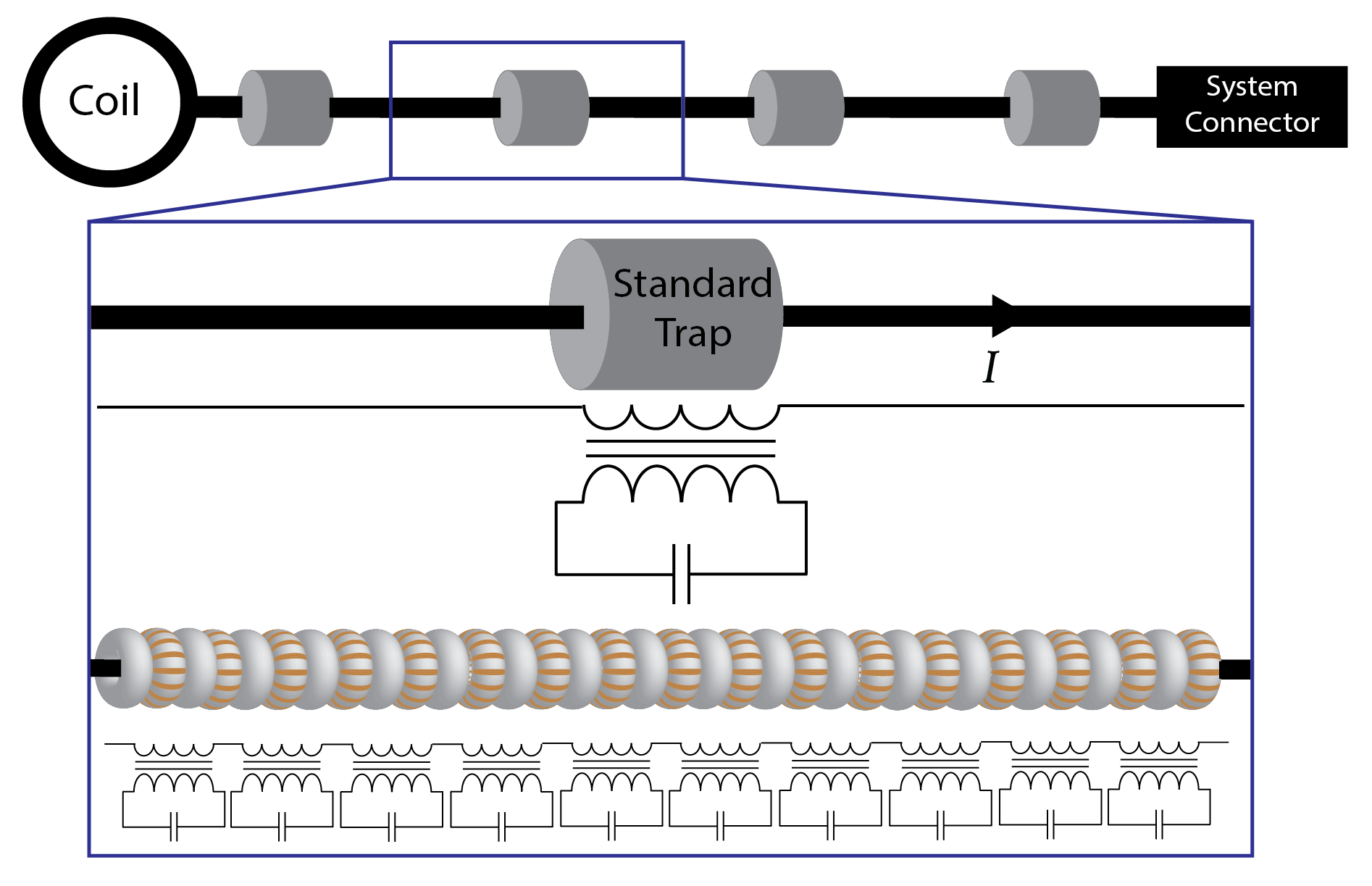
A few large floating
cable traps placed on a cable connecting an RF coil to the main system. A
portion of the cable is selected, comparing the standard floating trap design
to caterpillar traps. Standard floating traps inductively couple to the shield
current, $$$I$$$, and impose a large
impedance. In contrast, our distributed design of caterpillar traps consists of
smaller toroids each inductively coupling to the shield current. Although each toroid imposes a smaller impedance, by covering the full length of the
cable with these traps, shield currents can be sufficiently attenuated.
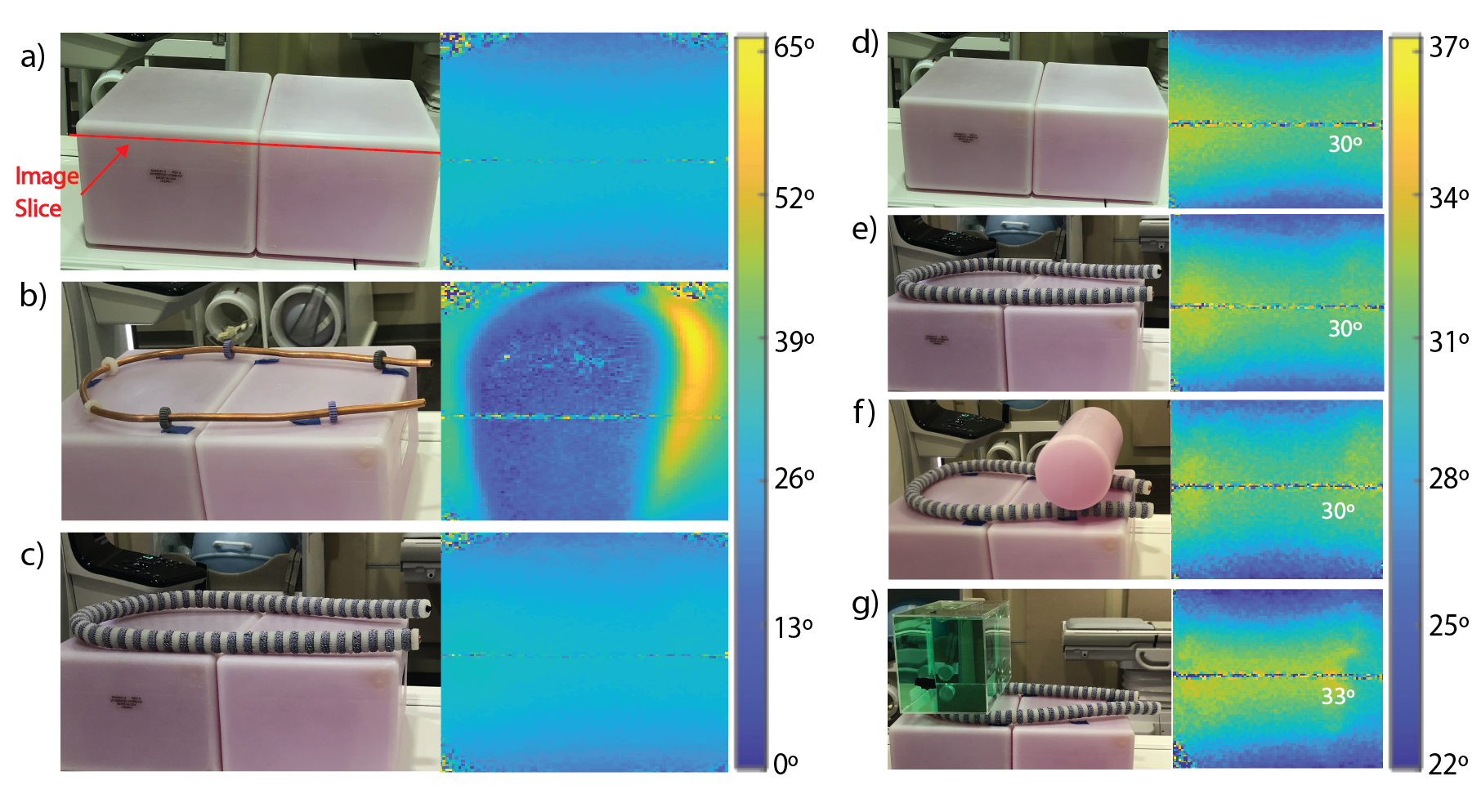
B1 mapping experiments. Initially, a B1 map with 30 degree
target flip angle of a slice 1cm below the top of phantoms is acquired with
three configurations and displayed in 0-65 degree range: a) phantom only,
conductor equipped with b) spacers only and c) caterpillar traps. d-e) Results
from a) and c), respectively, displayed in 22-37 degree range. To test the
performance under stress: f) a smaller non-loading phantom, g) a larger loading
phantom are placed as weight on the caterpillar traps and the maps are shown in
22-37 degree range. Putting weight on the traps has minimal effect.
